近日,杭州公海彩船智能科技有限公司申请的发明专利“基于多分辨率哈希地图的连续时间位姿估计方法”成功获得国家知识产权局授权。这项技术突破解决了在复杂动态环境下如何实现高精度、低延迟3D激光SLAM的难题,特别是在仅使用LiDAR数据且位姿估算难度较大的情况,成功提高了巡检机器人及其他运动底盘的地图管理能力,并在工程落地应用中发挥了关键作用。
一、技术方案亮点
该方案创新性地采用“连续时间建模 +多分辨率哈希地图结构”策略,在不牺牲精度的前提下,大幅提升了位姿估计的鲁棒性和效率。核心流程包含以下四个步骤:
Step 1:激光数据采集与预处理
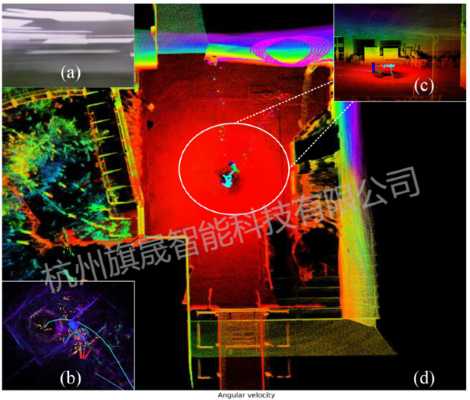
系统实时获取当前时刻的激光雷达数据,并按时间戳将整帧点云数据拆分为小块子帧;每一个子帧数据被精确地映射到全局坐标系中,为构建多分辨率地图和构建数据关联提供统一参考。
Step 2:构建多源残差与连续时间优化
· 在全局坐标系下,使用当前帧点云在多分辨率哈希地图中建立点-面残差(Point-to-Plane Residual),增强几何约束。
· 基于连续时间模型,引入:
o 位姿一致性残差(与上一帧相比)
o 速度一致性残差(考虑时间连续性)
· 将上述多源信息联合建模为一个优化问题,使用非线性优化方法(如ceres)高效求解每一帧数据的精确位姿。
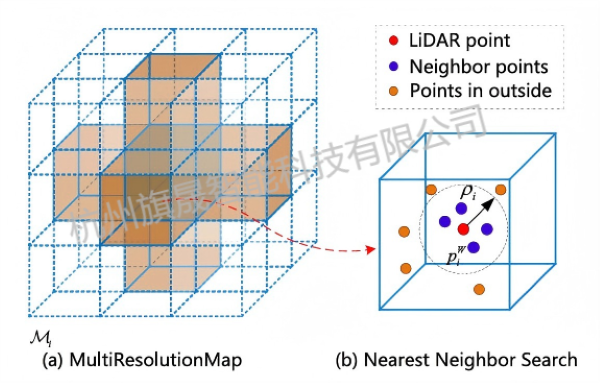
Step 3:多分辨率哈希地图更新与维护
· 基于估计的每帧数据的位姿,实时更新地图。
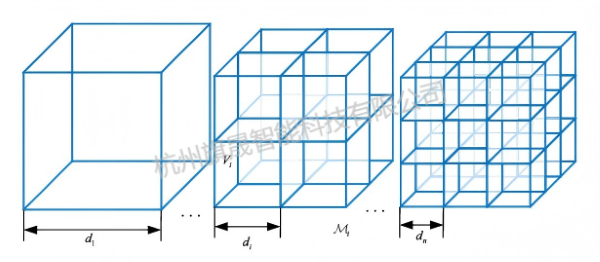
· 采用多分辨率哈希结构进行地图组织,使得地图既精细局部建图,又快速全局访问。
· 同时,系统会移除视野外区域的数据块,实现地图的“按需加载与卸载”,显著降低系统内存占用与I/O负担。
二、 技术优势总结
实施该方案后,巡检机器人将具备高实时性、高精度和轻量化的地图管理能力,运行稳定性和可靠性得到显著提升,该方案的技术优势如下:
✅ 连续时间建模:精细建模雷达运动轨迹,显著提升非同步数据处理精度
✅ 多分辨率哈希地图:兼顾空旷空间与狭窄区域的精细地图表示,室内外场景精度一致性高
✅ 点-面残差 + 运动一致性残差:鲁棒优化,减少漂移
✅ 动态数据卸载机制:保证长时间运行的资源可控性
✅ 纯激光方案:无依赖IMU或GPS,适用于定位受限环境
三、技术应用实践
该专利技术目前已部署于公海彩船智能全系巡检机器人产品,助力巡检机器人导航、室内外建图等关键环节,并在多个项目场景中验证:
1) 公海彩船自研的A2系列轮式巡检机器人:凭借该技术实现在甘肃某煤矿的配电室、35KV变压器室等四个场景的无人化自主定位巡检,对现场全区域进行实时视频监控、温度监测、噪声监测、气体监测,并对数字表计、信号灯、开关旋钮等进行AI检测,精准发现潜在问题,大幅提升巡检效率与准确性。

2) 公海彩船自研的A4系列机械臂轮式复合型巡检机器人,通过激光SLAM技术的应用,在多个轨交场所稳定定位运行,实现对列车车底、车轮、车侧等列车整体环境进行实时视频AI检测和特殊作业,极大节约了地铁等列车相关的人员巡检所、培训、监管等整体运维费用。

3) 公海彩船自研算法适配的G系列四足巡检机器人,通过自研定导算法的适配,实现在某五百强企业生产车间、某火车站站前广场等复杂多变的环境中,稳定动态避障、持续运行,高效完成巡检任务,搭载双摄云台相机、3D激光雷达等传感器、环境监测传感器等,结合公海彩船智能AI中台以及运维软件,实现了各场景下四足狗巡检机器人的快速部署及应用。

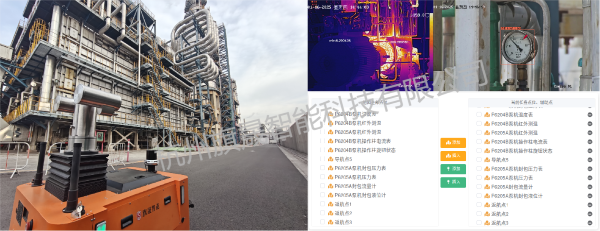
4) 公海彩船自研的Ex系列防爆轮式巡检机器人:依靠稳定的激光SLAM定位导航技术,在化工原料生产罐区,对现场全区域进行实时视频监控、温度监测、噪声监测、气体监测,并对作业人员进行安全帽、人员跌倒、环境漏液、仪器仪表等进行巡检,替代人工成为智能安全巡查员在高危环境下作业。
5) 其他场景:该算法专为3D纯激光SLAM设计,应用场景广泛,还适用于:
· 城市道路或隧道中的自动驾驶
· 室内移动机器人建图与定位
· 大型仓储环境中的自主导航系统
· 各类对实时性要求较高的嵌入式SLAM场景
四、总结展望
杭州公海彩船智能通过自研稳定可靠、可扩展、高精度的纯激光SLAM方案,将前沿研究转化为可量产的技术模块并赋能产品,为用户带来更智能、更高效的巡检机器人应用解决方案!该专利的提出不仅是算法突破,更是工程化思维智慧的体现。从底层算法突破到工程化应用落地,我们始终秉持 “精准、高效、可靠” 的技术理念,构建 “技术研发 - 产品迭代 - 场景拓展” 的全链条创新生态。未来,杭州公海彩船智能科技将继续深耕SLAM算法,以更多硬核技术成果,打造更优质的产品与服务,引领智慧运维新潮流!